Quadrocotpter sind komplexe mechatronische Systeme in denen Hardware, Elektronik und Software eng zusammen spielen.
Ziel dieses Projektes war es, aufbauend auf vorgegebene elektronischen Einheiten,
einen flugtüchtigen Quadrocopter zu entwerfen.
Analyse
Quadrocotpter erzeugen über vier Rotoren einen senkrecht wirkenden Auftrieb. Diese sind entweder in X- oder in +-Form angeordent.
Für das Projekt wurde die gebräuchlichere X-Konfiguration verwendet, welche gegenüber der +-Konfiguration ein stabileres Flugverhalten aufweist.
Durch unterschiedliche Drehzahlen der einzelnen Rotoren, kann eine Neigung der Rotorachsen erreicht werden und der Quadrocopter so gesteuert werden.
Durch Kombination der Grundbewegungsarten Pitch, Yaw und Roll kann der Quadrocopter präzise gelenkt werden.
X-Konfiguration
+-Konfiguration
Roll
Yaw
Pitch
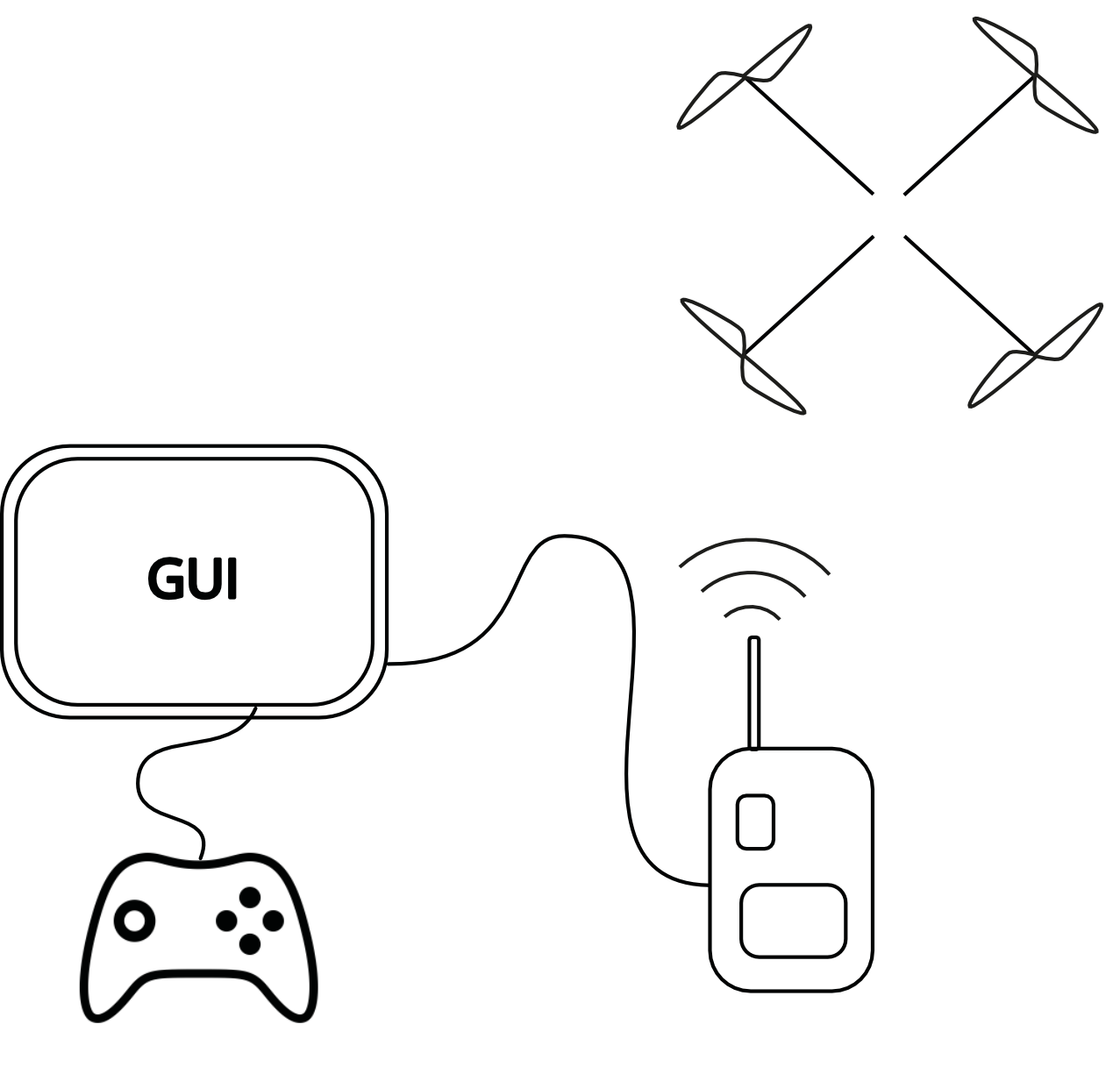
Der Quadrocopter kommuniziert über Funk einer sogenannten Groundstation, welche Daten vom Quadrocopter empfängt.
Diese werden in einem Steuergerät (bspw. Computer oder Smartphone) verarbeitet, mit eingehenden Befehlen verrechnet und zurück an den Quadrocopter gesendet.
Gesteuert wirde der Quadrocopter über einen Controller, sowie eine User-Interface auf dem Steuergerät.
Konzept
Ziel des Entwurfsprozesses war es ein Gehäuse zu entwerfen, welches alle kritischen Komponeten auch im Falle eines Absturzes schützt. Über eine Sandwich-Bauweise
sollte sichergestellt werden, dass alle Komponenten einfach zugänglich sind. Aluminiumprofile bieten eine stabile Verbindung der Rotoren mit Hauptkörper und ermöglichen
gleichzeitig eine einfachen Zugang zu den Steckverbindungen.
Umsetzung
Der Entwurf wurde schließlich mittels Solidworks in ein fertigungsgerechtes CAD-Modell überführt. Dabei sollten die Gehäuseschalen zunächst mittels 3D-Druck gefertigt werden,
um die Form zu überprüfen. Die Aluminiumprofile wurden mittels Lasercutter hergestellt.
Inbetriebnahme
Vor dem finalen Testflug wurden alle Teile montiert und auf ihre Funktion getestet. Die Steuerung wurd in einer VR-Umgebung auf Fehler untersucht
und verfeinert.
Graphical User Interface
Gesteuert wird der Quadrocpter per XBox-Controller über eine in C# programmierte Steuerung, welche die empfangenen Daten verarbeitet und in einem an die Gestaltung des Quadrocopters angelehnte User-Interface anzeigt.